![]() 博士(工学)立命館大学・院・理工 教授
博士(工学)立命館大学・院・理工 教授
| 専門分野 | 水中ロボット工学 |
| 研究課題/長期 | ダイバーに代わって作業できる水中ロボットの実現 |
| 研究課題/短期 | 水中ロボットのための操縦支援装置の開発、水中構造物検査や遺跡調査に役立つ水中ロボット技術の開発 |
 研究テーマ 環境と接触するタスクを実現するための水中ロボット技術の開発
研究テーマ 環境と接触するタスクを実現するための水中ロボット技術の開発
水中ロボットによるロボットアームやグリッパを用いた接触作業に求められる高精度な位置決めの実現は容易でありません。このため、接触作業のほとんどの場合、熟練したオペレータが水中ロボットの操縦を行っています。現状では水中ロボットによる接触作業の実現は必ずしも容易ではないですが、流体特性を利用した機構の開発やロボット・制御技術を利用することで克服できる可能性は十分にあります。本研究室では、水中ロボットによる接触作業の実現と効率化を図るため、以下のような研究課題に取り組んでいます。

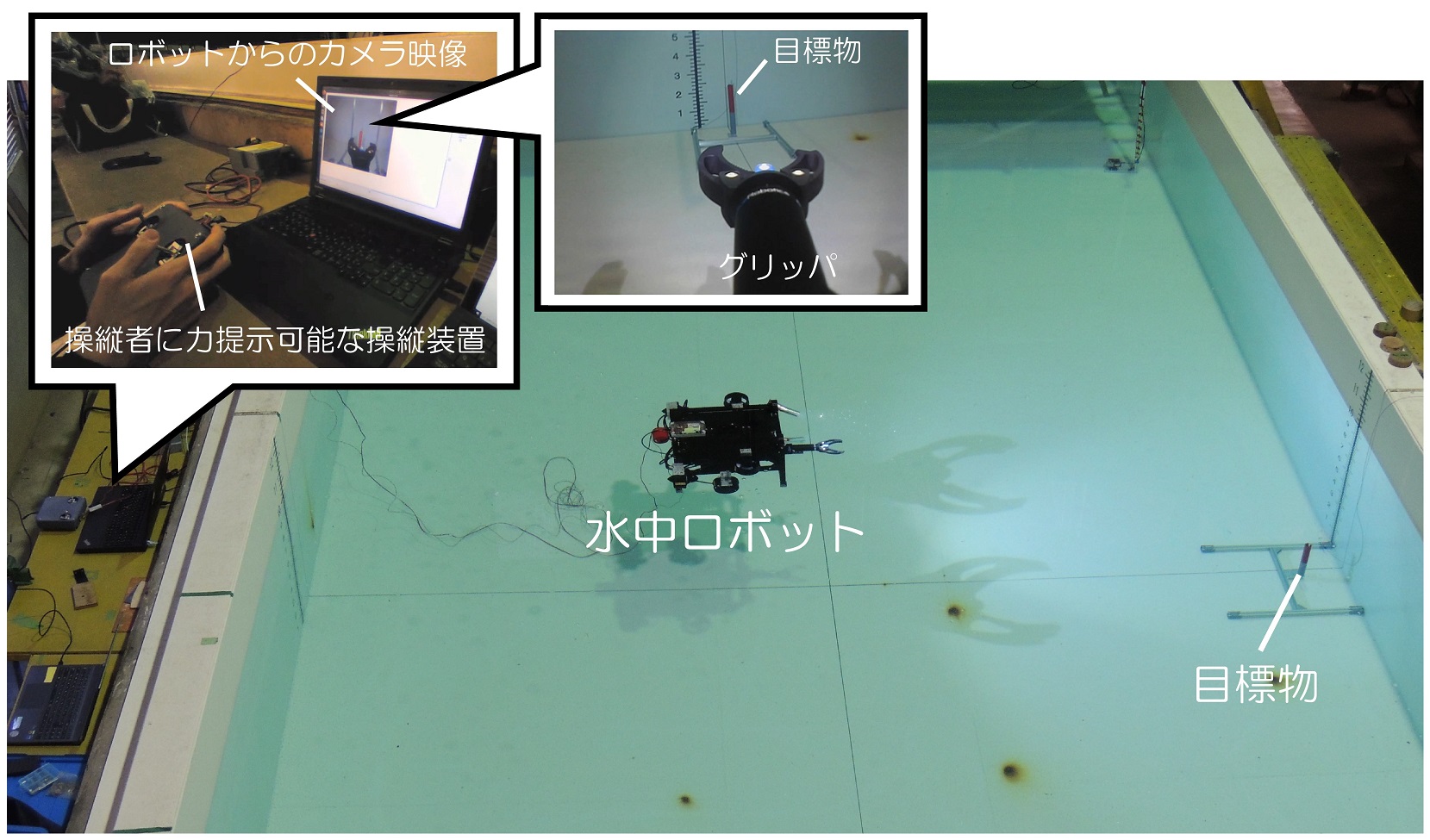
■ハプティックシェアードコントロールを用いた操縦支援装置による水中ロボット作業の効率化
力提示可能な操縦装置を開発し、自動化システムと人間が一緒になって水中ロボットを操縦することを目指しています。それぞれの長所・短所を活かし、補い合いながら水中ロボットによる効率的な作業の達成を目指します。
■水中ロボットのための構造物清掃ユニットの開発
水中構造物に付着する生物や汚れ等を清掃するためのロボットを開発しています。構造物の保守点検に役立てることを目指します。
■負圧効果による吸着機能をもつ水中アームロボットの位置・姿勢安定化
吸着機能をもつアームロボットが構造物等の壁面に吸着し、外乱中においても安定した接触作業の実現を目指します。
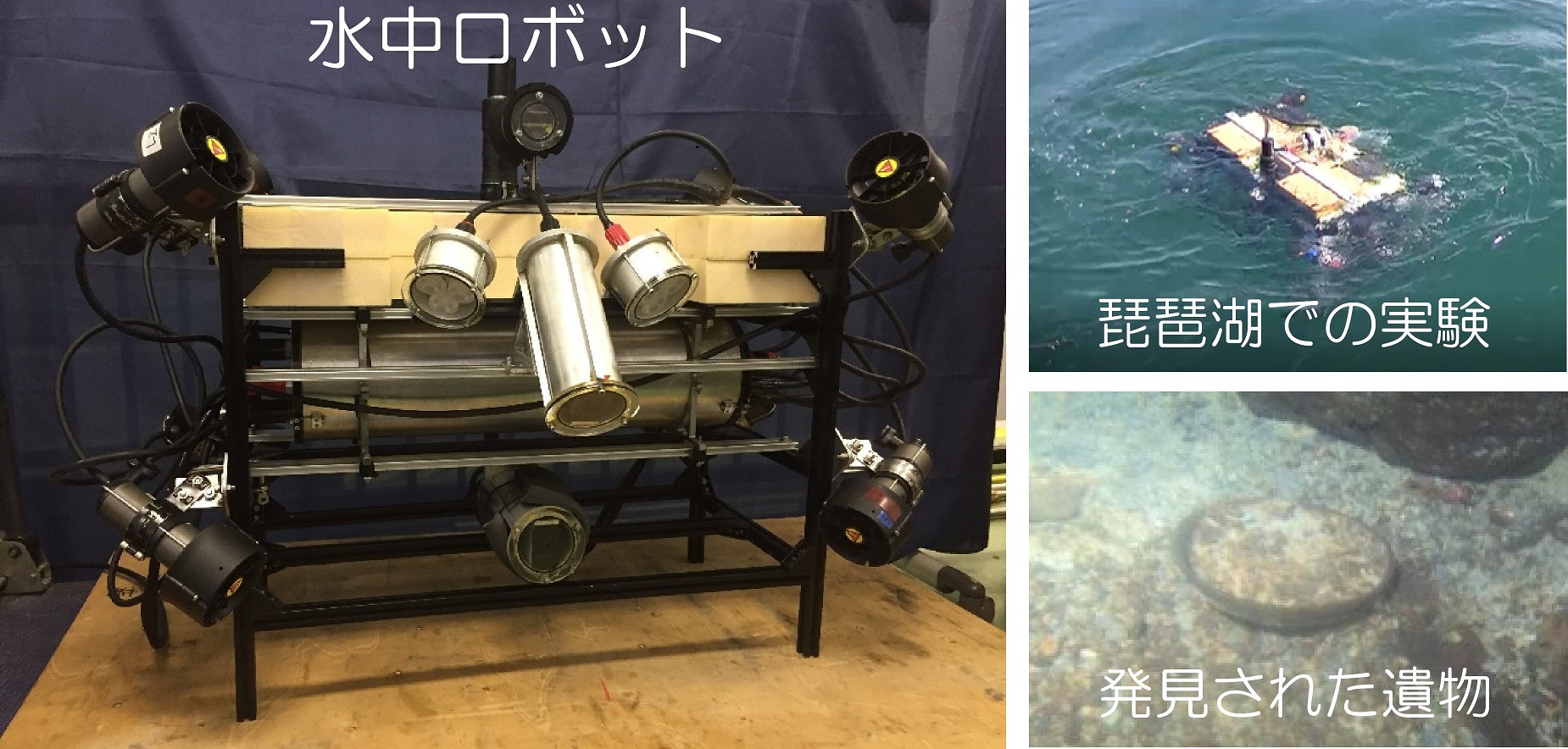
■水中ロボットによる海底遺跡調査のための発掘デバイスの開発
水中考古学者と一緒に、海底遺跡調査に役立つ水中デバイスを開発しています。発掘作業等を手助けし、新たな発見を目指します。