![]() 博士(工学) 岡山大・院・自然科学 准教授
博士(工学) 岡山大・院・自然科学 准教授
| 専門分野 | ロボット工学、メカトロニクス |
| 研究課題/長期 | 動植物を規範としたロボットメカニズムの開発 |
| 研究課題/短期 | アメーバの推進原理にヒントを得た管内走行型クローラロボットの開発、つる植物を規範とした巻き付き推進メカニズムの開発、脳機能再建を目的とした手指リハビリテーションデバイスの開発 |
 研究テーマ 動植物を規範とした新しいロボットメカニズムの開発
研究テーマ 動植物を規範とした新しいロボットメカニズムの開発
動植物の構造や機能を解明し,新しいロボットメカニズムを生み出すことが研究室のテーマです.
通常,高性能なロボットは,複数のセンサおよび高度なコンピュータ制御によって達成され,またそれによってロボットには知性がもたらされます.一方,当研究室では,自然の謎を解明しそれを活かすことで,あえて”シンプルなメカニズムのみによってロボットに知性をもたらす”ことを追究しており,当研究室ではこれを”Mechanical Intelligence”と呼んでいます.
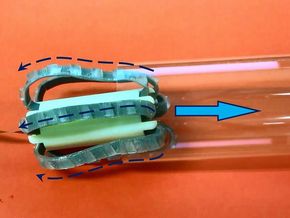
研究テーマとしては,例えばアメーバの推進原理にヒントを得た移動ロボット”メカニカルアメーバ”の研究をしています.アメーバの細胞質流動に基づく推進原理をメカニカルな機構で再現し,ガス・水道管内やヒトの大腸内,さらに血管内といったこれまで極めて困難とされていた環境も容易に走行可能な移動機構の実現を目指しています.また,生体筋のように軽くて力強い人工筋肉の研究や,リハビリ機器への応用開発なども行っています.さらに動物のみならず植物にも着目しており,つる植物の巻きつき動作を参考にした巻きつき推進メカニズムの研究開発にも取り組んでいます.