1インチの細管内走行を目的とした新しいクローラ型移動機構の開発
(JKA「RING!RING!プロジェクト」平成28年度補助事業)
1 研究の概要
ガス管や水道管などのライフラインの役割を担っている配管のメンテナンスは,破裂や腐食による事故を防ぐ上で不可欠である.そこで本研究は異径管走行・段差乗越え及び管内上昇が可能な小型の管内走行ロボットを実現することを目的とする.申請者はこれまでに,異径管や継手部のような段差においても高い走破性を有する,円筒状のクローラ機構を独自に開発し,現時点で内径50mmの管内走行に実現している.今回,フレキシブルシャフト駆動構造の開発により1インチ管の管内走行に成功した.また,T字管などの管路分岐部において任意の方向に走行可能なステアリング機構を開発した.
2 研究の目的と背景
ライフライン等の役割を担っている配管のメンテナンスは,破裂や腐食による事故を防ぐ上で必要不可欠である.そのためこれまでに,大学や企業で何十年もの間,管内検査ロボットが数多く研究されてきたものの,実環境で想定される異径管走行や段差乗越えおよび上昇を行うためには,複数のモータが必要であったり機構を複雑化する必要があるため,水道管・ガス管など,"細管部"を多く有する配管内を検査可能な有効な検査装置・ロボットは未だ実現されていない.そこで,本研究では,工業用に多く使用される配管で最小径の1インチ管を走行可能な管内走行ロボットを開発することを目的とする.
3 研究内容
3.1. フレキシブルシャフト駆動型クローラの開発
3.1.1 現状のロボット構造
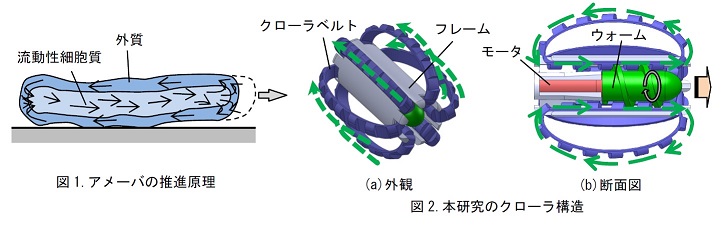
本研究ではこれまでに,管内径の小さな配管環境でかつ垂直管内や異径管内においても容易に走行可能な管内走行用クローラ型ロボットの実現を目的として,アメーバの推進原理にヒントを得て,複数のクローラベルトを単一のウォームを介して単一のモータで駆動させる,シンプルな機構の円筒状湾曲型弾性クローラの開発を行ってきた(図1,図2).本クローラは,シンプルな機構のため小型化が可能なものの,内径φ50mm以上の管内でないと走行できない.そこで本研究では更なる小型化を図りφ25mmの管内走行を実現するために,フレキシブルシャフト駆動型クローラを提案する.
3.1.2. フレキシブルシャフト駆動型クローラの構造
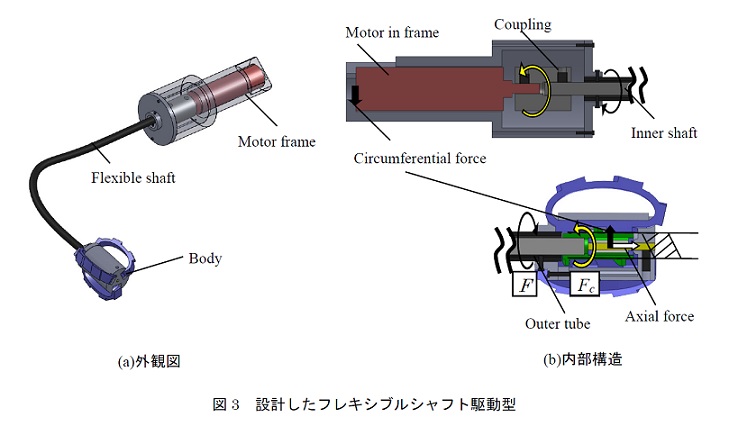
クローラを小型化しようとした場合,必然的にモータも小さくなるため,駆動力が著しく低下することで推進のために有効な駆動力を得られない問題が生じる.そこで,この問題の解決手段として,図3(a)のようにモータを外付けとし,その回転力をフレキシブルシャフトを通してロボット内部のウォームギヤに伝達する,フレキシブルシャフト駆動機構を設計した.これにより,機体内にモータを収める必要が無いため,大幅な小型化が可能であると考えている.
さらに,外付けしたモータの大きさはロボットのサイズや検査対象である腸の大きさに制約されること無く選定可能となるため,従来のモータ内蔵型の問題点であった低トルクに起因した移動速度不足や牽引力不足を解決できると考える.
提案機構では,フレキシブルシャフトの一端を,機体から外付けしたモータの軸に,もう一端をウォームに接続することで,外付けしたモータのトルクを機体内部に伝達させることができる.ウォームには,その回転軸上に,ロボットフレームの軸方向と同軸上にベアリングで支持された丸棒軸が取り付けられている.また,3本のクローラベルトが円筒状のロボットフレームの軸周りに対して等間隔に,ベルト歯がウォーム歯と噛み合うように配置されている.
3.1.3. フレキシブルシャフト駆動型クローラの試作と走行実験
試作した機体を図4に示す.試作機は,モータフレームからロボットフレームまでの全長は1.08m,質量は282.3g である.また外径は,クローラベルトに外圧が掛かっていない状態ではΦ40mm,外圧をかけてベルトをフレームに接触するまで弾性変形させた状態ではΦ21mmである.
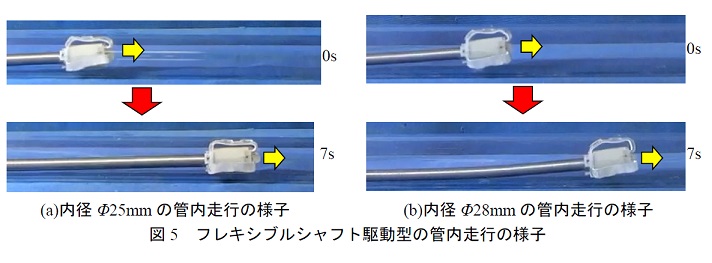
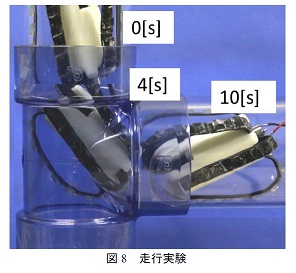
試作したフレキシブルシャフト駆動型が,水平な一様管内の走行が可能であるかの検証を行った.一様管には,内径Φ28mmと内径Φ25mmのアクリルパイプを使用した.走行の様子を図9に示す.動作実験を行った結果,モータの回転をフレキシブルシャフトを介してウォームに伝え,ウォームと噛合うすべてのクローラベルトが駆動して前進する様子を確認した.また,モータ内蔵型が走行可能な最小管内径がΦ28mmであったのに対し,フレキシブルシャフト駆動型はその径よりも小径のΦ25mmの管内を走行できることを実証した.

3.2. ステアリング機構の開発
3.2.1 ステアリング機構の検討
現在の構造は,ストレート管は走行可能なものの,T字管のような分岐部において,任意に進行方向を選択しながら走行することは不可能である.そこで,能動的に進行方向を選択可能なステアリング機構を開発する.
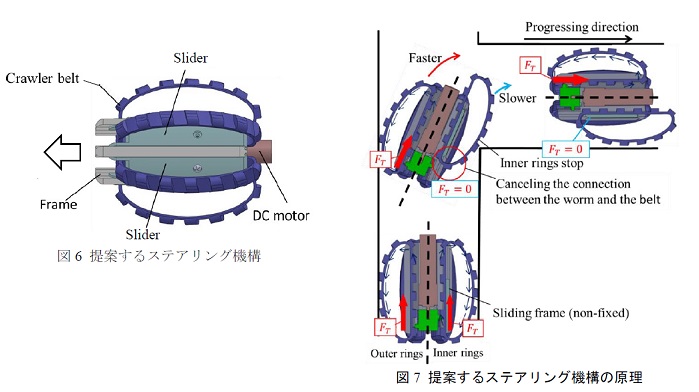
提案するステアリング原理とその機構を図6および図7に示す.円筒状湾曲型弾性クローラは,ベルトの駆動力がフレームに伝達されることで,ロボットに牽引力が発生し,前進する.本ステアリング機構のフレームには,スライドを,ベルトとフレームの間にFig.3に示すように配置しており,それぞれのスライドは,独立に固定・非固定が可能である.スライドを非固定にした場合,ベルト駆動時にスライドが軸方向に移動することによってベルト駆動力のフレームへの伝達が消失される.スライドを固定した場合は,ベルト駆動力がフレームに伝達され,牽引力を生み出す.つまり,6本のベルトのうち,非固定スライド部においては,ベルト駆動力がフレームに伝達されず(牽引力を発生せず),固定スライド部においては,ベルト駆動力がフレームに伝達される(牽引力を発生する).
本機構は,この牽引力差を利用してステアリング動作を行う.例えば,6本のベルトのうち,ロボットの進行方向に向かって右側(左側)3箇所のスライドを非固定とし,左側(右側)3箇所のスライドを固定とすることで,ロボットの左半面(右半面)のみに牽引力が発生し,ロボットは右方向(左方向)に進行する.
3.2.2 ステアリング機構の試作と走行実験
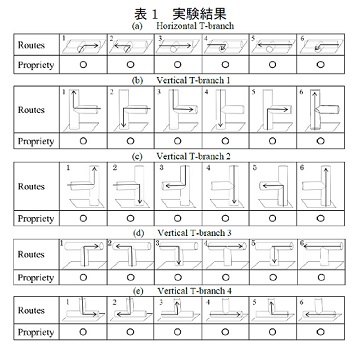
本提案機構を試作し,提案手法の実証実験を行った.実験ではφ77mmのアクリルT字管内を走行環境とし,本クローラロボットが分岐部において,任意の方向に進行可能かどうか検証した.実験結果を図8および表1に示す.走行中は,非固定スライド部式フレームがスライドすることで牽引力差が発生し,機体を内側に傾けてT字管を曲がる様子が観察された.また実験の結果,表1に示すすべてのT字管においてステアリング動作が可能であった.ただし,このステアリング原理は非固定スライドを元の位置に戻す機能は無いため,T字管を曲がった後も機体は旋回し続け,停止する.したがって今後は,T字管を通過後も走行可能にするために,能動機構を開発する必要がある.
4 本研究が実社会にどう活かされるかー展望
人々の豊かな社会環境の構築には,生活の基盤となる設備の維持は重要な役割の一つとなる.そのような中でガス管・上下水道管は,日常生活を送る上で欠かせないライフラインである.しかしそのメンテナンスは,現状は配管内部の状態を直接十分に検査できないため腐食のまま放置しているケースもあり,我々の生活基盤を脅かしているといっても過言ではない.こうした中で,本研究成果が実用化すれば,特にこれまで困難とされた小径管内の走行が可能となり,検査可能な配管の数・種類が飛躍的に拡がるため,結果,安全・安心な社会環境の構築に大いに貢献できるのではないかと考える.
さらに,本提案機構を応用することにより,管内走行用移動機構のみならず,瓦礫内要救助者探索ロボット,大腸内視鏡デバイスおよび医療用カテーテルなど,本研究の波及効果は高いものと考える.
5 教歴・研究歴の流れにおける今回研究の位置づけ
申請者は,ロボットの移動機構の研究を専門としている.今回の研究課題は,社会問題にも発展しているパイプラインの老朽化とその対策について,専門である移動機構の観点から当該課題の解決にアプローチしたものである.
6 本研究にかかわる知財・発表論文等
学術論文: Junya Nagase et al., Steering System of Cylindrical Elastic Crawler Robot, IEEJ Transactions on Electrical and Electronics Engineering.(印刷中)
特許出願:
出願番号 特願2018-005241(出願日:2018年1月16日)
発明の名称 「クローラ型ロボット」
発明者 永瀬純也,福永二三佳
7 事業内容についての問い合わせ先
所属機関名: 龍谷大学理工学部 永瀬研究室
住 所: 〒520-2194
滋賀県大津市瀬田大江町横谷1-5
申 請 者: 役職名 講師
担当部署: 理工学部
E-mail: nagase@rins.ryukoku.ac.jp
URL : http://mec3342.mecsys.ryukoku.ac.jp/nagase/