水中ロボットの操縦を支援する触覚共有制御システム

近年、様々な場所で水中ロボットの活用が進んでいます。しかし、流水や波といった外乱がある環境での水中ロボットの操縦は、経験の浅い操縦者にとって決して容易ではありません。
そこで現在、触覚共有制御(Haptic Shared Control) という技術を用いて、初心者でも水中ロボットをスムーズに操縦できるシステムの開発に取り組んでいます。触覚共有制御とは、自動制御と人間が同じ操縦装置(例えば、自動車のハンドルを運転手と自動運転システムが共有するように)を使ってロボットを操作する手法です。
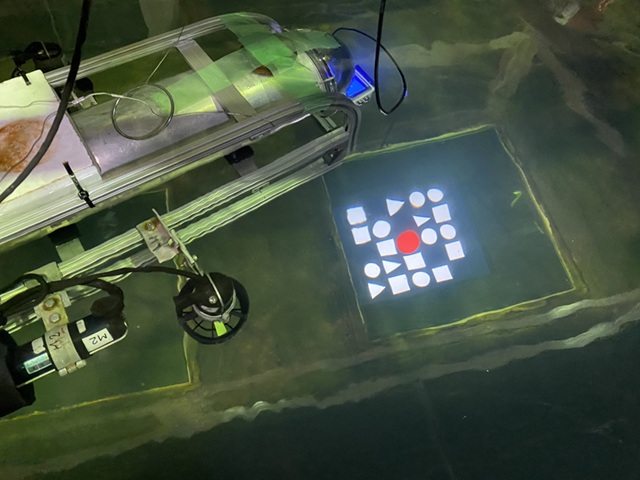
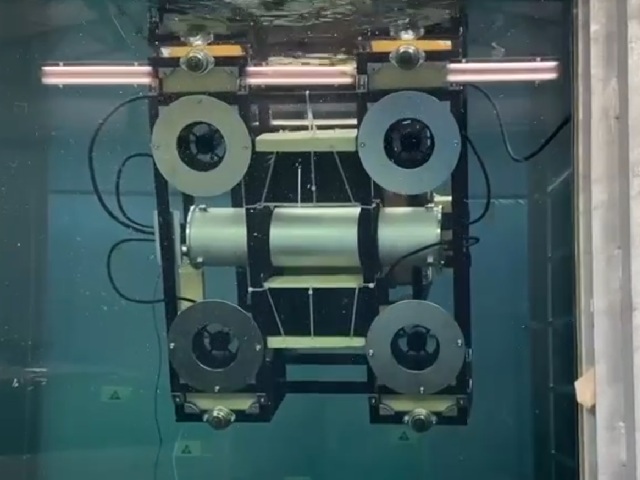
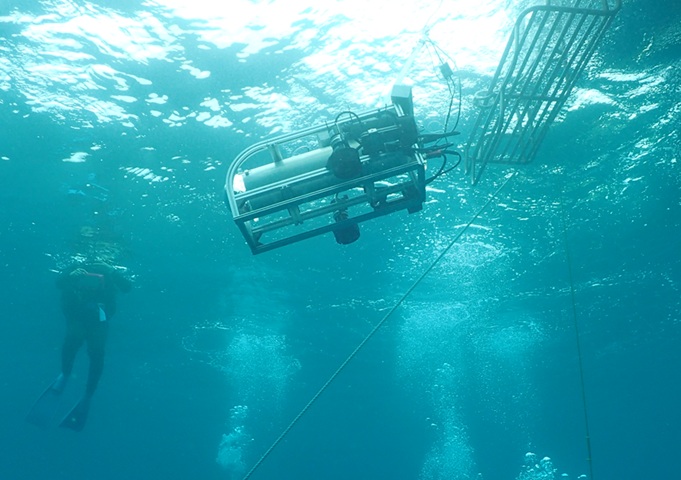
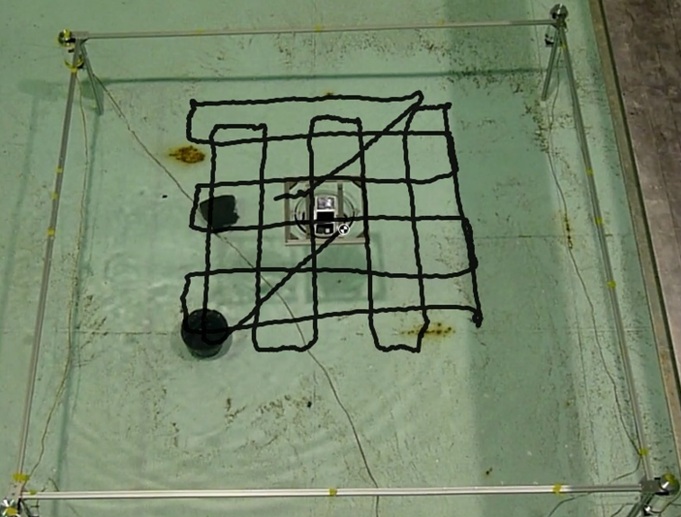
この触覚共有制御の有効性を検証するため、水槽実験を行いました。左の図は、操縦者がいなくても自動でジョイスティックを操作できる操縦装置(内部に駆動用のモータが内蔵されています)と、流速中にある水中ロボットです。これらを用いた実験の結果、流れの中で水中ロボットを操縦する際に、操縦者の精神的な負担が軽減され、目標位置との誤差も小さくなることが確認できました。この研究は現在も進行中です。
この研究は、奈良先端科学技術大学院大学 和田隆広研究室との共同研究です。
小型水中ロボットによる水中発掘の実現
近年の水中考古調査では、ダイバーだけでなく水中ロボットも遺跡や遺物の調査に活躍しています。特に繊細な作業が求められる発掘では、遺物の損傷を防ぐため、マニピュレータを備えた大型の水中ロボットが主に使われてきました。しかし、これらの大型機は運用に大規模な船舶が必要なため、調査費用が高額になり、使用できる場所も限られるという課題がありました。
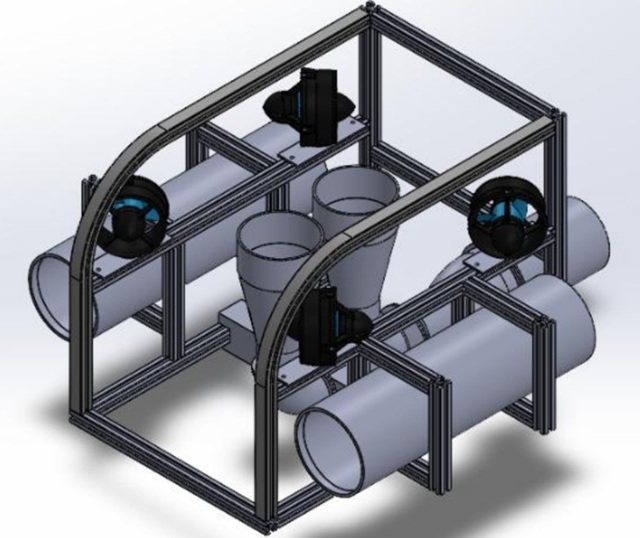
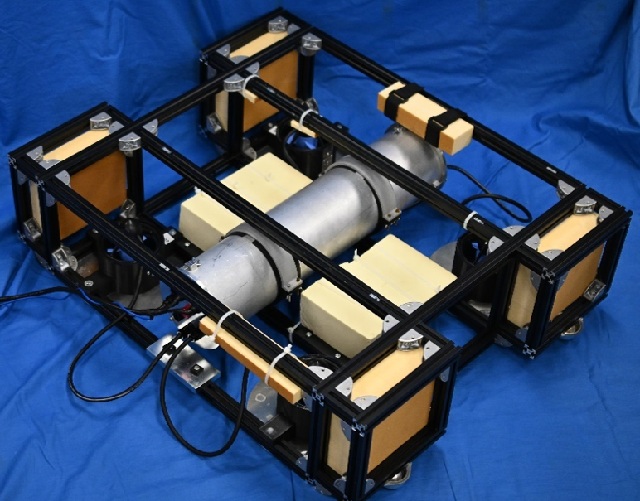
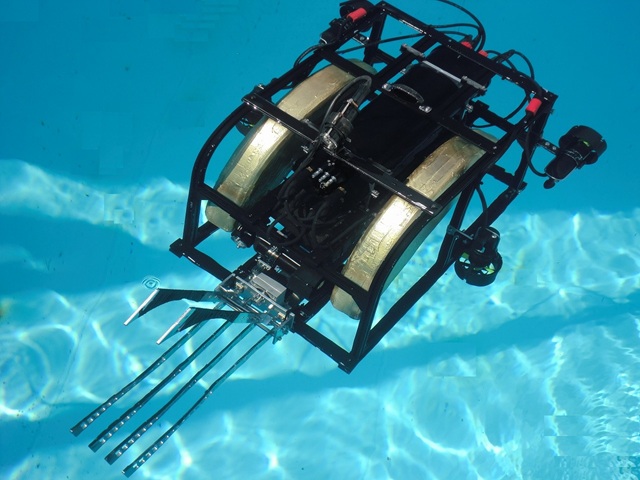
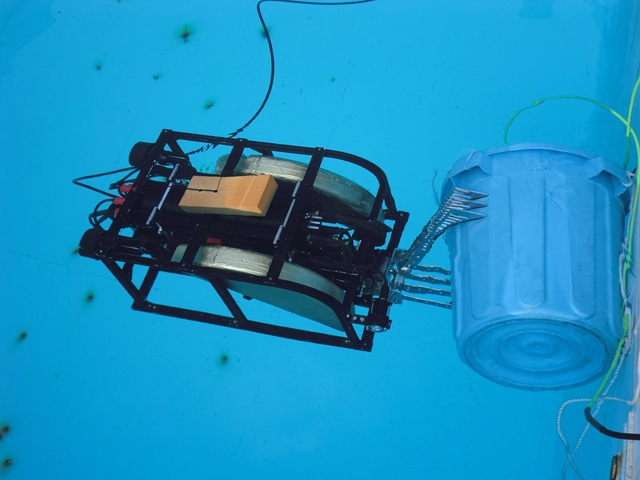
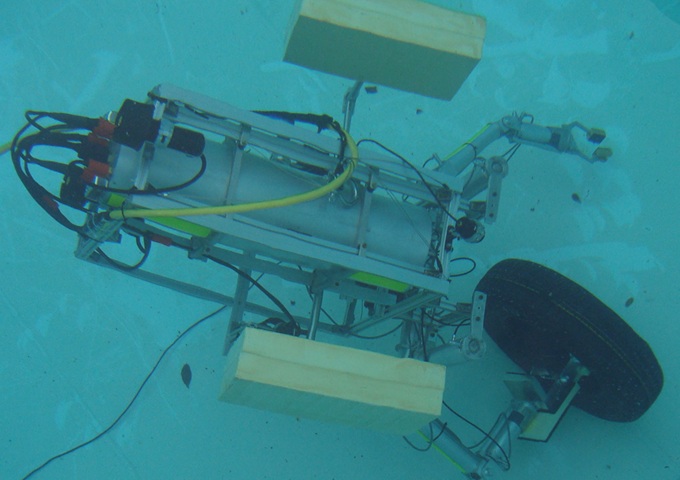
そこで私たちは、低コストで発掘調査が行える小型水中ロボットの開発を進めています。これは、当研究室が開発した水中ロボット「K-chan」や「MIKAN」の後継機にあたります。開発中のロボットは、底砂や底泥を効率的に吸引する発掘デバイスを搭載しています。これにより、水中での視界不良を防ぎながら、精度の高い発掘作業を実現することを目指しています。
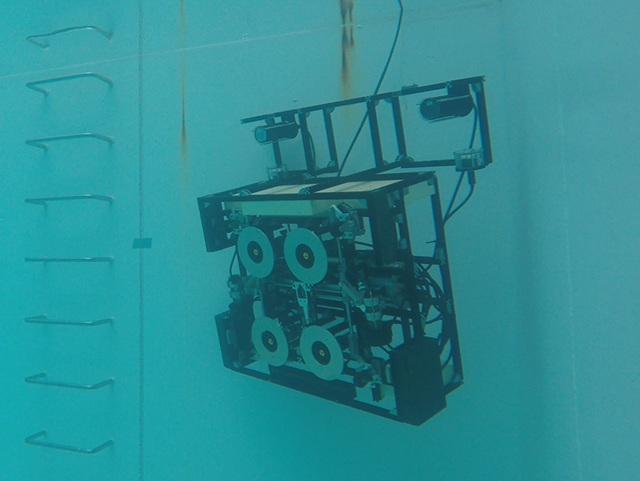
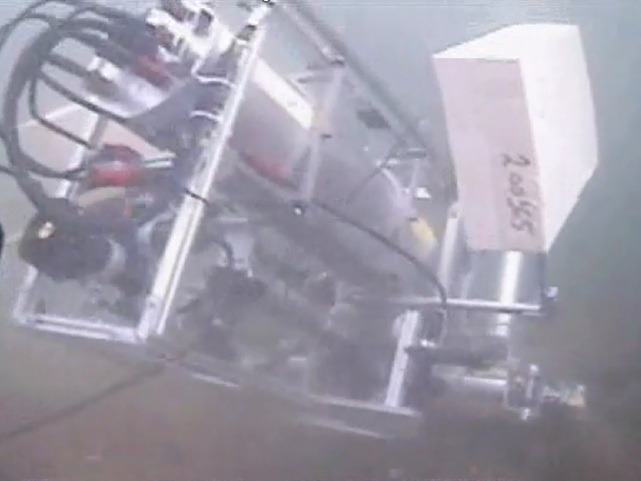
左の写真は、発掘デバイス単体と、設計中の水中ロボットです。
船舶・水中構造物清掃ユニットの開発
船舶の船底にフジツボなどの生物が付着すると、水との抵抗が増え、燃料消費量が悪化します。そのため、定期的な船底清掃でこれらの付着生物を取り除くことは、燃費改善と船舶の持続可能性向上に非常に効果的です。
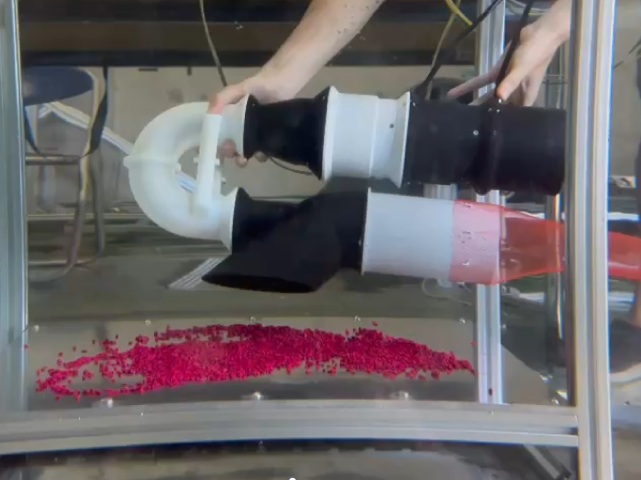
そこで本研究では、船舶や水中構造物に付着した生物を剥がすことも可能な構造物検査ユニットを開発しています。このユニットは、人が持ち運び可能なサイズで、市販の水中ロボットに取り付け可能です。さらに、水中構造物の壁面に安定して吸着できる機能を備え、構造物に合わせて姿勢を変化させる制御機能を持つシステムの実現を目指しています。
水中ロボット・ARTEMI(有手海、アルテミ)
小型軽量(32kg)な水中6自由度グリッパロボットを開発しました。 従来、水中において器用なハンドリング作業を行おうとすると、マニピュレータを持つ大型高重量なロボットシステムを必要としました。
本研究では、システム全体の軽量化・小型化が図れるように、 マニピュレータのグリッパ部分(手首より先の部分)だけが単体で独立に動作するイメージでロボットを開発しました。このグリッパロボットは、6自由度の運動(並進3自由度、回転3自由度)が可能で、小型軽量にもかかわらず、 水中での組み立て作業などが実現できます。
また、このグリッパロボットを操縦しやすいように専用の操縦装置も設計・製作しました。
この研究は、立命館大学川村貞夫研究室および応用地質株式会社との共同研究でした。
水中ロボット・MITSURUGI(海剣、ミツルギ)
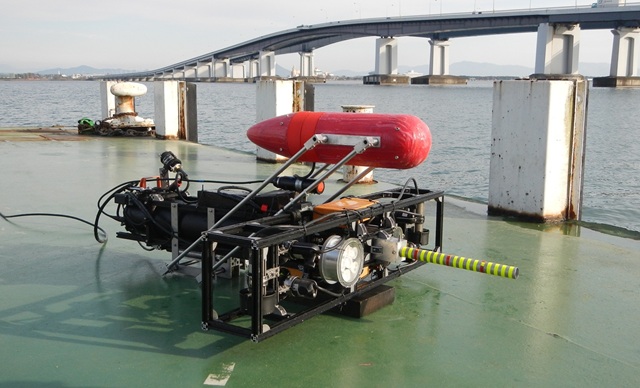

海底や湖底の泥を採取し、調べることは科学的調査などで重要な意味を持ちます。本研究では、小型ロボットによって採泥を簡単に実現するロボットシステムを開発しました。移動浮力機構を用いて、採泥時や水中移動時の流体抵抗が少なくなるよう、ロボットは姿勢を変えることができます。スクリューの力によってロボットが海底や湖底に採泥パイプを突き刺すことで底泥の採取を行います。
GPSや方位センサなどを利用して、自動的に採泥地点まで移動し、採泥を行う実験を琵琶湖にて実施し、成功しました。
この研究は、立命館大学川村貞夫研究室および応用地質株式会社との共同研究でした。
水中ロボット・ケイちゃん K-chan

開発してきた水中ロボットのベースとなった小型水中ロボットです。研究室で設計・試作した電装基板、センサ等の各種機器、ソフトウェアをテストする際は、このロボットを利用していました。
沖縄工業高等専門学校 武村史朗研究室と共同でも、このロボットを利用していました。
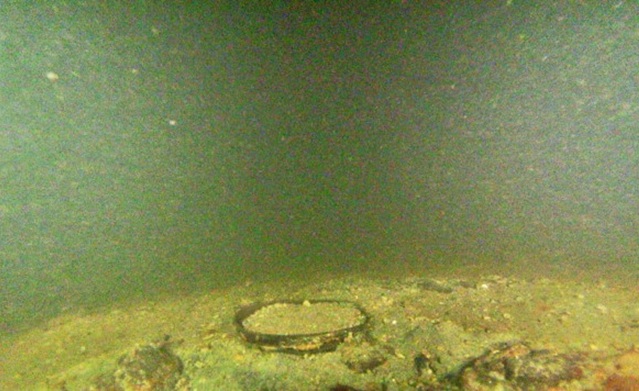
15kgと軽量なため、過去6回の石垣島での調査にも活躍し、海底遺跡のハイビジョン撮影(左の写真はロボットが撮影した海底にある錨です)、サンゴ礁の撮影などに利用しました。このロボットはゲームコントローラで簡単に操縦できるようにしてあるため、 高校生への水中文化遺産教育の活動にも利用しました。
水中ロボット・TEIKAM(堤観、テイカム)

ダム堤体の目視検査を目的とした水中ロボットを開発しました。一般的に、小型軽量な水中ロボットはスラスタのパワーが弱く、外乱に対する位置保持性能が劣ります。そのため、不慣れな操縦者の場合、水中ロボットの位置制御が困難になります。
一方、この研究で開発したロボットは、負圧効果を発生させる吸着機構を備え、ダム堤体に吸着し、安定した移動を実現します。また、鮮明で連続的な画像取得を可能にします。
三重県の青蓮寺ダムでのフィールド実験を行い、その結果から、開発したロボットが、熟練した操縦者や高精度な制御法に頼ることなしに、ダム堤体の鮮明な連続画像を得ることに成功しました。
このロボットは、立命館大学川村貞夫研究室との共同研究でした。
水中ロボット・MIKAN(海観、ミカン)

考古学調査のための水中発掘作業を行う、小型軽量な水中ロボットを開発しました。これまで、底泥や底埋もれた遺物の発見にはダイバーや大型水中ロボットによるマニピュレータを用いた発掘作業が不可欠でした。一方で、発掘ツールの規模や作業反力の影響から、小型軽量な水中ロボットによる発掘作業は困難でした。
そこで、マニピュレータではなくスラスタを用いて、海底や湖底から堆積物を除去できる35kgの軽量水中ロボットを開発しました。堆積物除去時のスラスタの反作用を補償するため、8つのスラスタを搭載しています。これらのスラスタは、堆積物除去と水中ロボットの機敏な動作を可能にします。開発したロボットは、琵琶湖での遺跡調査にも活躍しました。
このロボットは、立命館大学川村貞夫研究室との共同研究でした。
水中パラレルワイヤ駆動システムによる観測と計測
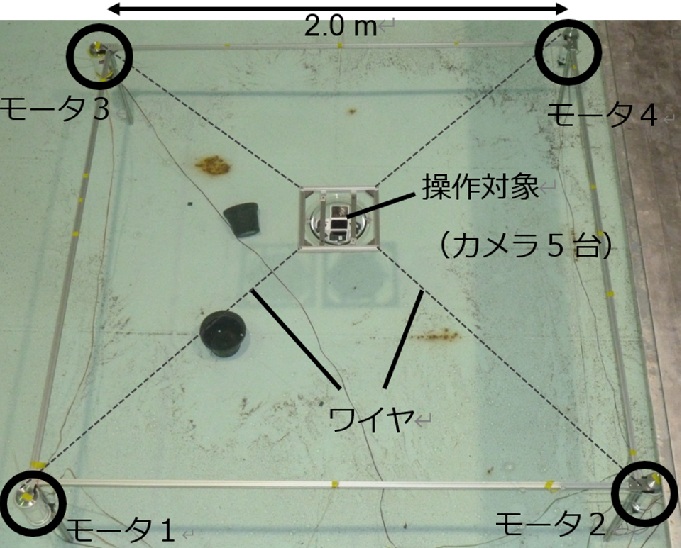
写真測量や長期の定点計測を目的とした持ち運び可能な水中パラレルワイヤ駆動システムを開発しました。カメラやセンサ等を運動させるために用いるワイヤは流体の抵抗を受けにくいためエネルギー効率が良く、操作対象の水中での高速運動も期待できます。通常、ロボットの可動部分は剛体で構成されますが、ワイヤを用いることで剛体部分を削減できるため軽量化にも適しています。
湖底や海底に設置することで長期の観測や計測の実現を目指しました。試作機では、防水されたカメラ5台を、パラレルワイヤ駆動システムによって操作し、水中物体の撮影を行い、撮影対象の3Dモデル化を試みました。
この研究は、中京大学木野仁研究室との共同研究でした。
波浪推進船


波のエネルギーを推進力に変えながら自律的に航行する船を開発しました。東海大学海洋学部 寺尾裕教授との共同研究の成果です。この船は「波浪推進装置」と呼ばれる推進器を持ち、波のエネルギーを吸収し、それを推進力に変える装置です。自律航行装置は坂上研で開発しました。
実験水槽や折戸湾(静岡市清水区折戸)での実験でその有効性を検証しました。
推進力は常に波のエネルギーから得られ、また無人機であることから、長期間の調査や危険な水域での調査に有効利用できます。
この研究は、東海大学寺尾裕研究室との共同研究でした。
水中ロボット・COCO Discovery(湖虎ディスカバリー)


小型水中ロボットを使って水中構造物などの目視検査を実現するため、ロボットと検査対象物との機械的接触を積極的に利用する方法を検討しました。機械的接触を有効利用することで、小型水中ロボットでも対象物に対して安定的に定点維持が容易となり、鮮明なカメラ映像の取得やマニピュレータを使った作業も実現できました。またこのロボットも姿勢調整機構を持ち、対象物に対して柔軟に姿勢を変更できます。
このロボットを使って、東海大学の所有する・海洋調査研修船望星丸の船底調査も実施しました。
この研究は、立命館大学川村貞夫研究室および大日本スクリーン製造株式会 (現・株式会社SCREENホールディングス)との共同研究でした。
水中ロボット・COCO(湖虎、ココ)
2本の作業アームと姿勢調整機構を持つ人間サイズの水中ロボットを開発しました。従来のロボットアームを持つ水中ロボットは大型高重量で、姿勢を変えることも困難でしたが、このロボットはダイバーのように狭所での作業や、調査対象に合わせて姿勢を変えて(上や下を向いて)の作業も実現できます。また人間サイズであるため、レジャーボートを利用した調査も可能です。
琵琶湖での実験を通してその有効性を検証しました。また、その内容の一部はTBSテレビ夢の扉+で放送されました。
この研究は、立命館大学川村貞夫研究室および大日本スクリーン製造株式会 (現・株式会社SCREENホールディングス)との共同研究でした。