
私たちの研究室では
私達の研究は、水中での作業をより効率的かつ自動化することを目指しています。現在、水中ロボットは非接触での観測や計測においては大きく進歩し、自律化や自動化が進んでいますが、実際に水中の物体に触れて行う作業では、いまだにダイバーや熟練した水中ロボット操縦者に頼る部分が多く、自動化が十分でないのが現状です。
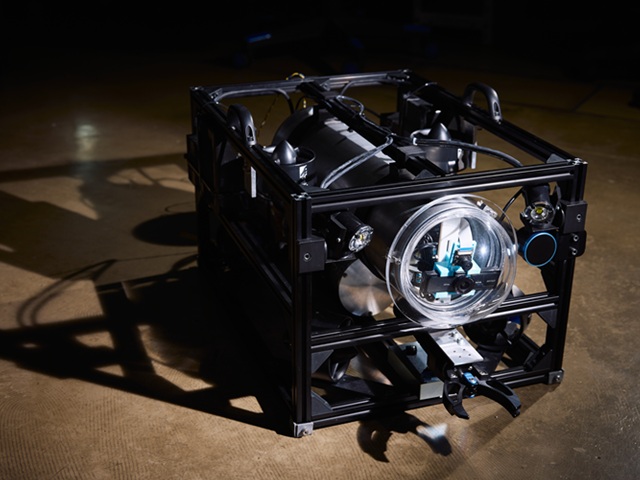
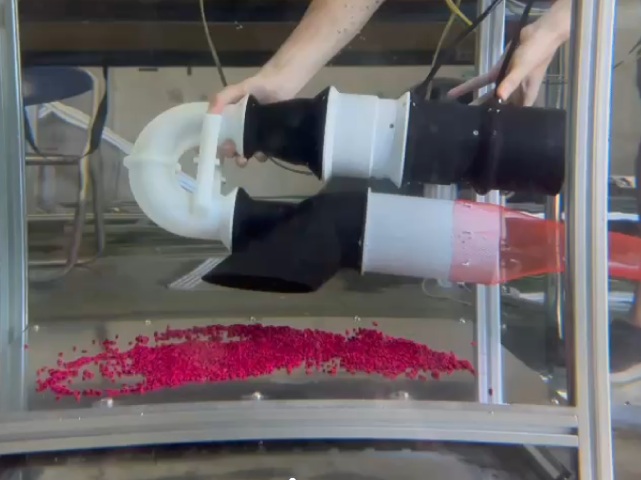
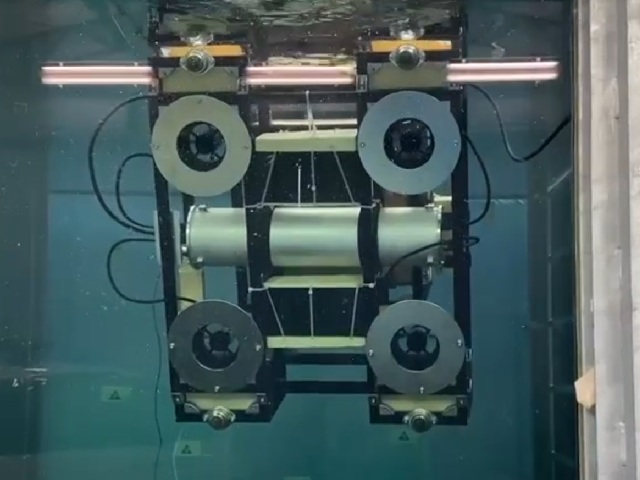
そこで私達は、この水中での接触作業の効率化と自動化に焦点を当て、まずは人間と自動制御とが協力する協調制御の実現、水中考古学分野での発掘作業、そして港湾構造物のメンテナンス作業への応用を目指しています。これらの目標を達成するために、回路基板設計、防水・耐圧容器設計、制御プログラミングといった、ロボット開発に必要となるほとんどの要素を自ら手掛けています。そして、開発したロボットが意図した性能を発揮できるかを確認するため、実際に現場でのフィールド実験も実施しながら研究を進めています。